
1. MARS (Martian Air Rover & Sampler) in very low altitude hovering over Mars surface.
ADIB (see ADIB) is very modular. I have further explored the applicability and modularity of ADIB and it resulted in a concept for applications of ADIB on planet Mars called, MARS (Martian Air Rover & Sampler).
Martian air is different from that of Earth. It's atmosphere is composed mostly of carbon dioxide with pressure of only 0.6% that of Earth at sea level. By this comparison alone, without considering the gravity, the low altitude air density on Mars is equal to the air density at 35km altitude on Earth - the air on Mars is very thin.

However, since Mars gravity is only 40% that of Earth gravity, Mars air at low altitude is actually denser than that of Earth at the same altitude when adjusted to the same pressure. This is why "aerobraking", the technique of using the atmospheric drag to safely land vehicles from air was successfully used to land various landers on Mars surface - aircrafts can fly on Mars.

MARS the quadcopter will be very effective for Mars exploration because it can travel safer and faster than the vehicles travelling on the surface, as it travels in the air, and also it can land on specific spots for specific activities, roving in the air and sampling the surface - the reason it is properly named, "Mars Air Rover & Sampler".
The top surface of MARS is fully covered by solar cells to provide continuous charging of batteries that power its 4 electric contra-rotating propellers. There is however, a pole at the center that houses a stereo camera for piloting MARS and a communication antenna.
There are 4 "compound-eye" cameras, circular lighting and a robotic arm at the bottom surface of MARS. When at a distance from a sampling site, the cameras provide parallel view of a sample directly below MARS, but at a close proximity, the cameras provide 4 sided view of the sample. The lighting is to light the sample when it is under shade. The robotic arm at the center can can dig into the sample, scoop the sample, hold it, crash it and feel it, and finally transfer the sample into the storage inside the fuselage for further analyses. The samples later can be returned to the sampling site or delivered to the base for collection and more detailed specific analyses.

The robotic arm actually has a hand palm and fingers that are very similar to that of human, as such is considered the best hand palm and fingers design for scientific activities designed by human scientist. The fingers can even feel the texture of the sample and there are sensors with low-power lasers at the end of the fingers and on the palm. Therefore the hand not only can pick up a sample, but it can also perform significant scientific analyses of the sample.
The sampling can be done while hovering at a fix point above the sampling site or by landing on the site. For perfect landing and sampling, MARS 4 landing gears are telescopic and computer-synchronized so that it always land horizontally even if the sampling sites may be on a slope.

MARS is autonomous as there is not yet a human exploration on Mars. However, as there are planned human exploration on Mars, I have also produced a concept of manned MARS called "MARS-II", described in a following chapter.
DISCLAIMER
1. The Mars panorama in figure 1 & 6 is from a public website.
2. Figure 2 & 3 are from 2 different public websites.
Martian air is different from that of Earth. It's atmosphere is composed mostly of carbon dioxide with pressure of only 0.6% that of Earth at sea level. By this comparison alone, without considering the gravity, the low altitude air density on Mars is equal to the air density at 35km altitude on Earth - the air on Mars is very thin.

2. View of Mars & Earth from an altitude within their atmosphere.
However, since Mars gravity is only 40% that of Earth gravity, Mars air at low altitude is actually denser than that of Earth at the same altitude when adjusted to the same pressure. This is why "aerobraking", the technique of using the atmospheric drag to safely land vehicles from air was successfully used to land various landers on Mars surface - aircrafts can fly on Mars.

3. Aerobraking at work in Mars atmosphere.
MARS the quadcopter will be very effective for Mars exploration because it can travel safer and faster than the vehicles travelling on the surface, as it travels in the air, and also it can land on specific spots for specific activities, roving in the air and sampling the surface - the reason it is properly named, "Mars Air Rover & Sampler".
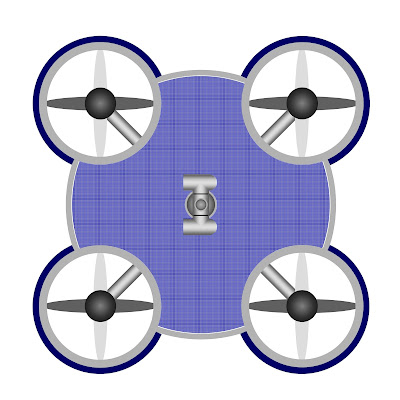
The top surface of MARS is fully covered by solar cells to provide continuous charging of batteries that power its 4 electric contra-rotating propellers. There is however, a pole at the center that houses a stereo camera for piloting MARS and a communication antenna.

4. Top view of MARS: The top of it is fully covered by solar cells, except for the telescopic pole at the center which houses the piloting stereo camera & communication antenna.
There are 4 "compound-eye" cameras, circular lighting and a robotic arm at the bottom surface of MARS. When at a distance from a sampling site, the cameras provide parallel view of a sample directly below MARS, but at a close proximity, the cameras provide 4 sided view of the sample. The lighting is to light the sample when it is under shade. The robotic arm at the center can can dig into the sample, scoop the sample, hold it, crash it and feel it, and finally transfer the sample into the storage inside the fuselage for further analyses. The samples later can be returned to the sampling site or delivered to the base for collection and more detailed specific analyses.

5. Side view of MARS with its 2 foreground ducted fans removed to make the robotic arm & 3 out of 4 compound-eye cameras visible.
The robotic arm actually has a hand palm and fingers that are very similar to that of human, as such is considered the best hand palm and fingers design for scientific activities designed by human scientist. The fingers can even feel the texture of the sample and there are sensors with low-power lasers at the end of the fingers and on the palm. Therefore the hand not only can pick up a sample, but it can also perform significant scientific analyses of the sample.
The sampling can be done while hovering at a fix point above the sampling site or by landing on the site. For perfect landing and sampling, MARS 4 landing gears are telescopic and computer-synchronized so that it always land horizontally even if the sampling sites may be on a slope.

6. MARS landed on a sloped surface: Notice that its fuselage is horizontal due to synchronization of its telescopic landing gears.
MARS is autonomous as there is not yet a human exploration on Mars. However, as there are planned human exploration on Mars, I have also produced a concept of manned MARS called "MARS-II", described in a following chapter.
DISCLAIMER
1. The Mars panorama in figure 1 & 6 is from a public website.
2. Figure 2 & 3 are from 2 different public websites.
Chapter 5: Why1000 Gardenia & Why1000 SMC (Strategic Military Carrier)
Chapter 7: Pushquito Push Quadcopter
Chapter 7: Pushquito Push Quadcopter

No comments:
Post a Comment